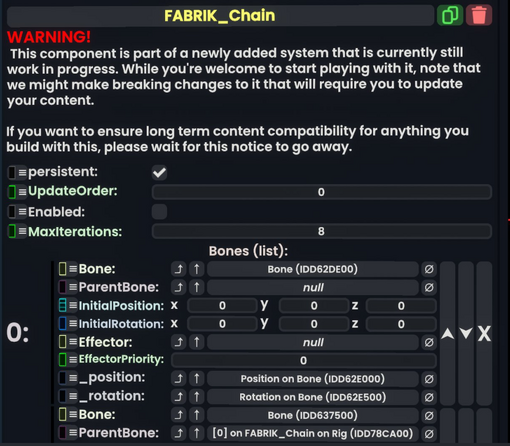
Added FABRIK_Chain component (under Transform/Inverse Kinematics) (this is first part of new in-house IK system, issue #612)
This allows setting up and simulating arbitrary IK chains
This uses StrikePose under the hood for IK solving
Any bone can have an effector assigned
It also propagates bone rotations/twists from the effectors through the chain
If the chain is invalid (e.g. parents aren't setup properly, there's a loop of bones, no root bones etc.) the IK will not solve and be reset to default pose
Constraints and other options aren't supported yet --but will be coming soon(ish)!