RemoteConnectionPointDriver allows driving local position, vector, orientation and size from a target Slot. It can be used with [[Component:TubeWireMesh|TubeWireMesh]] and [[Component:StripeWireMesh|StripeWireMesh]] to drive the other point from another slot.
<!--T:6-->
<!--T:6-->
Line 8:
Line 7:
|Name=Remote Connection Point Driver
|Name=Remote Connection Point Driver
}}
}}
RemoteConnectionPointDriver allows driving local position, vector, orientation and size from a target Slot. It can be used with [[Component:TubeWireMesh|TubeWireMesh]] and [[Component:StripeWireMesh|StripeWireMesh]] to drive the other point from another slot.
== Fields == <!--T:2-->
== Fields == <!--T:2-->
{{Table ComponentFields
{{Table ComponentFields
|FilterThreshold|Float|
|FilterThreshold|Float| The threshold before recalculating the target values.
|LocalPoint|{{RootFieldType|FieldDrive`1|[[Type:Float3|Float3]]}}|TypeAdv5=true| The field to drive with the position of <code>TargetPoint</code> with an offset of <code>TargetVector</code> converted to this slot's local space.
|LocalVector|{{RootFieldType|FieldDrive`1|[[Type:Float3|Float3]]}}|TypeAdv6=true| The field to drive with a vector of <code>TargetVector</code> in the transform space of <code>TargetPoint</code> converted to this slot's local space.
|LocalOrientation|{{RootFieldType|FieldDrive`1|[[Type:FloatQ|FloatQ]]}}|TypeAdv7=true| The field to drive with the rotation of <code>TargetPoint</code> with an offset of <code>TargetVector</code> converted to this slot's local space.
|LocalSize|{{RootFieldType|FieldDrive`1|[[Type:Float|Float]]}}|TypeAdv8=true| The field to drive with the scale of <code>TargetPoint</code> with an offset of <code>TargetSize</code> converted to this slot's local space.
}}
}}
Line 29:
Line 30:
== Related Components == <!--T:5-->
== See Also == <!--T:5-->
<!--T:7-->
<!--T:7-->
Latest revision as of 03:22, 1 August 2025
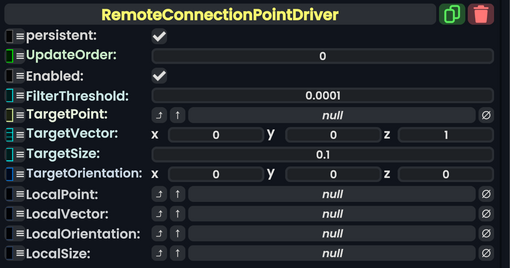
Component image
Remote Connection Point Driver component as seen in the Scene Inspector
RemoteConnectionPointDriver allows driving local position, vector, orientation and size from a target Slot. It can be used with TubeWireMesh and StripeWireMesh to drive the other point from another slot.