RemoteConnectionPointDriver allows driving local position, vector, orientation and size from a target Slot. It can be used with TubeWireMesh and StripeWireMesh to drive the other point from another slot.
RemoteConnectionPointDriver allows driving local position, vector, orientation and size from a target Slot. It can be used with [[Component:TubeWireMesh|TubeWireMesh]] and [[Component:StripeWireMesh|StripeWireMesh]] to drive the other point from another slot.
* It's not a complete physical rope simulator or anything, but it lets you connect two endpoints using the different wire mesh types. [https://discord.com/channels/402159838827905024/735381514988159016/884508590776389662| Official Discord conversation]
* It's not a complete physical rope simulator or anything, but it lets you connect two endpoints using the different wire mesh types.
* Hyper convenience components that make tube meshes squishy like neurons [https://misskey.neos.love/notes/9ayr0ptm5x| Post in jp Community]
* Hyper convenience components that make tube meshes squishy like neurons
== Examples == <!--T:4-->
== Examples == <!--T:4-->
[https://discord.com/channels/402159838827905024/469131434628612116/884387788651384882| Official Discord post when update (2021.9.6.614)]
== Related Components == <!--T:5-->
== Related Components == <!--T:5-->
Latest revision as of 21:32, 3 March 2024
RemoteConnectionPointDriver allows driving local position, vector, orientation and size from a target Slot. It can be used with TubeWireMesh and StripeWireMesh to drive the other point from another slot.
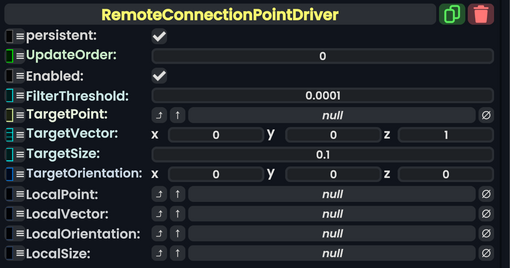
Component image
Remote Connection Point Driver component as seen in the Scene Inspector